Functionality¶
The main features¶
Operates in two modes gravity monitoring and configuration mode ESP32 ESP8266
In
gravity monitoringmode it behaves just like the iSpindle, it wakes up at regular intervals, measures angle/tile, temperature, calculates gravity and pushes the data to defined endpoints.In
configuration modethe device is always active and the webserver is active. Here you can view the angle/tilt values, change configuration, update the gravity formula. When in this mode you can also interact with the device via an REST API so data can be pushed to the device via scripts (see API section for more information).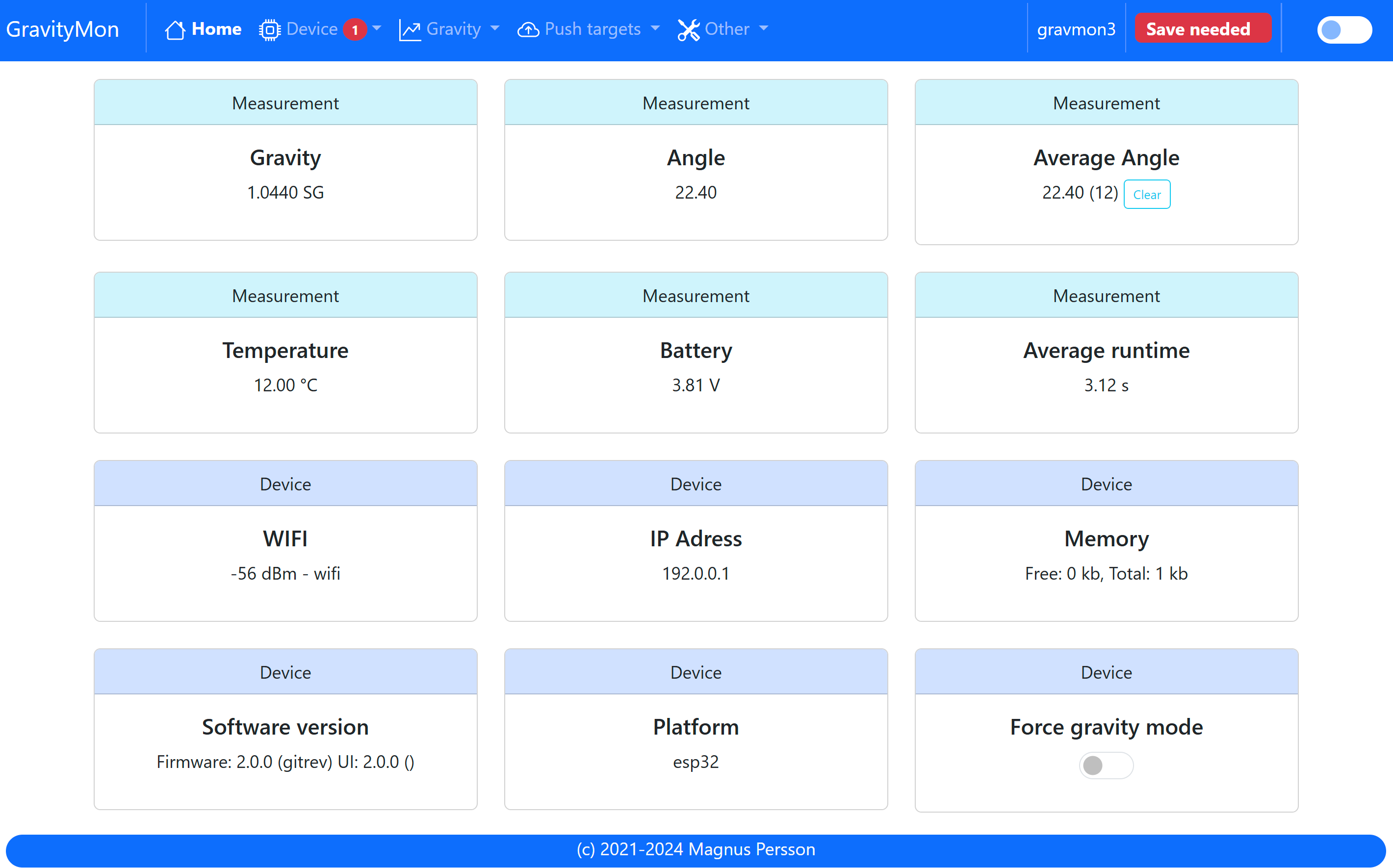
You can force the device into
configuration modewhile measuring gravity. This is useful when calibrating the device so you don’t needs to wait for the device to wake up and push the data. The entire calibration sequence can be handled via the web interface without need for additional software tools.See the Configuration section for more information on how to trigger the configuration mode.
Can send data to multiple endpoints ESP32 ESP8266
The original iSpindle can only have one destination, this software will push data to all defined endpoints so in theory you can use them all. However this will consume more battery power so use only as many as needed. Its much more efficient to have the endpoints on your local network than on the internet.
Currently the device supports the following endpoints.
http (ssl optional)
influxdb v2 (ssl optional)
MQTT (ssl optional)
Brewfather
Home Assistant
Brew Spy
Brewers Friend
Fermentrack
Ubidots
Thingsspeak
Under the Service Integration section you can find guides for how to connect GravityMon to these services. For a description of what data is transmitted you can see Data Formats.
The software support SSL endpoints but currently without CA validation, this means that the data is encrypted but it does not validate if the remote endpoint is who it claims to be.
if you require CA validation please leave a comment on GitHub and I will make that a priority. Adding this function will dramatically reduce the battery life of the device.
Note
Using SSL on a small device such as the esp8266 can be unstable since it requires a lot of RAM to work. And running out of RAM will cause the device to crash. So enable SSL with caution and only when you really need it. GravityMon will try to minimize the needed RAM but the remote service might not support that feature.
Gravity velocity ESP32 Only
Calculates the number of gravity points that will be lost over the coming 24 hour period.
1 point equals an SG value of 0.001
This gives an indication on how active the yeast is. This feature uses the RTC MEM which is a memory that is not lost during deep sleep and only exist on the ESP32. The feature stores average data from the last 16 hours in 4 hour periods and use this for estimating the fermentation velocity. The number indicates now many gravity points that will be lost in the next 24 hours.
Filtering gyro output ESP32 Only
From v2.2.0 the project now supports running data through a filter (Moving Avereage Filter) which helps to smooth out the data. This feature uses a RTC_MEM to allow data to be stored during deep sleep which only exist on ESP32 boards. The feature is only applied when the device is in gravity mode and data measurements are done.
Storage mode ESP32 ESP8266
When placed on the cap (close to 9 degrees) the device will go into storage mode and sleep for a long time. Its recommended to have a reed (magnetic) switch connected to the reset pin to wake up the device when needed.
Storage mode when charging ESP32
When power (>2V) is applied to the charging pin the device will go to deep sleep until the power is lost. This can be used together with a wireless charger so the device is sleeping when charged and starts automatically when charger is removed. This needs to be enabled in configuration and also valid pin needs to be set for the target (not all targets is build with this feature enabled).
Supports multiple gyro ESP32 ESP8266
From v2.2 the project is now supporting additonal gyro implementations to keep up with the technology changes. Gyro detection is automatic. Currently the following gyros are supported:
MPU-6050, standard gyro used in the iSpindle
MPU-6500, variant of the above gyro
ICM-42670-p, does sampling in the background with lower power consumption, higher accuracy and faster data collection, longer batterylife.
Thanks to Levi–G for his contribution to support the ICM-42670-p gyro. The main benefits with the ICM gyro is:
Multiple Bluetooth data tranmission options ESP32 Only
TILT has been support since the ESP32c3 board was supported but in this release there are a few new options that allows for more data to be transmitted.
Tilt. Data: Gravity,Temp. Works with passive or active scanning by the client.
Tilt PRO. Same as above with higher accuracy.
Gravmon Eddystone. Data: Gravity,Temp,Angle,Battery,ChipID. Requires active scanning by the client.
Gravmon Service. Data: Full iSpindle JSON payload. Works with passive or active scanning by the client but require to a connection.
RAPT v1 / RAPT v2. Data: Gravity,Temp. Compatible with the RAPT pill format for services that support it.
WIFI Direct to GravityMon Gateway ESP32 ESP8266
This works in combination with the GravityMon Gatewat that will act as an Access Point (AP) and receive data from GravityMon and then forward it to the right destination. The Gatewway works with both BLE and WIFI. This works only in gravity mode and will force the device to connect to the closest defined AP with the best reception.
Create gravity formulas on the device ESP32 ESP8266
Another big difference is that this software can create the gravity formula in the device, just enter the angle/gravity data that you have collected. You will also see a graph simulating how the formula would work.
Currently the device can handle 20 data points which should be enough to get a accurate formula.
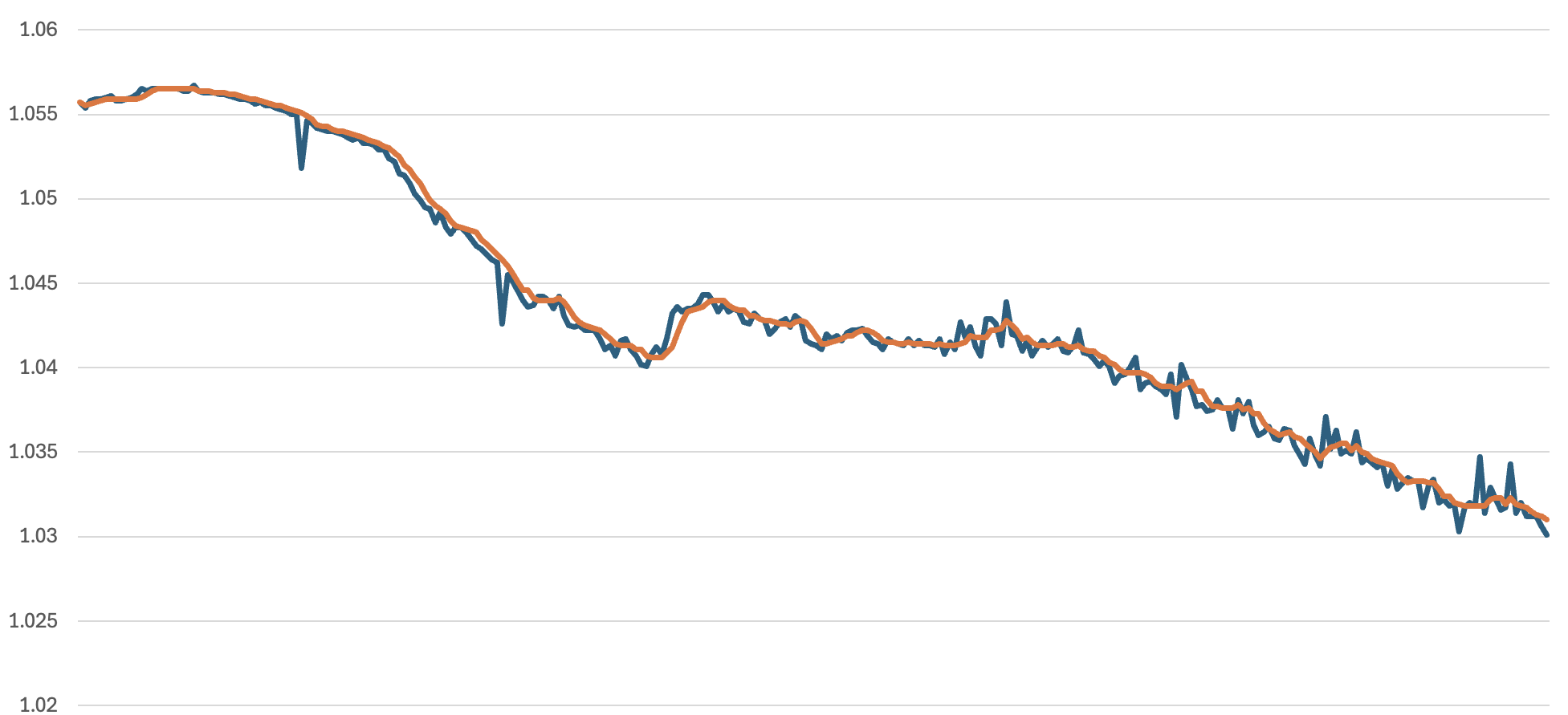
You can also analyse how the formula compares to your raw data and formulas of different complexities.
Customize the data format being sent to push targets ESP32 ESP8266
In order to make it easier to support more targets there is a built in format editor that can be used to customize the data that is to be sent. This way you can easily adapt the software to new targets without coding. If you have a good template please share it on the github repository and I will add it to the documentation for other users to enjoy. See the Format Templates for more information. See Service Integration for a list of services currently validated.
Validation of common configuration errors ESP32 ESP8266
Common configuration errors or hardware problems will now be displayed on the front page. The following are checked:
Newer software version available
No gyro connected
Gyro not calibrated at 90 degrees
Missing gravity formula
No push targets defined
Skip sleep mode setting
No temperature sensor connected
Battery voltage out of range
Automatic temperature adjustment of gravity reading ESP32 ESP8266
If you want to correct gravity based on beer temperature you can do this in the formula but here is a nice feature that can correct the gravity as a second step making this independent of the formula.
Migration of formula and gyro calibration from iSpindel ESP8266 Only
If GravityMon is installed over an working ispindel it can migrate calibration formula and gyro settings making the transition smooth.
OTA support from webserver ESP32 ESP8266
When starting up in configuration mode the device will check for a software update from a webserver. This is an easily way to keep the software up to date. In the future I might add a hosted endpoint for providing updates. OTA can also be done over a SSL connection.
Backup and Restore of settings ESP32 ESP8266
All the configuration of the device can be exported and stored as a text file (json). This can be used to restore settings in case of hardware problems. You can also create a template of your settings and use that on multiple devices. Just make sure to change the “id” fields to match your device id (can be found on the index page).
DS18B20 temperature adjustments ESP32 ESP8266
You can adjust the temperature reading of the temperature sensor. In normal cases this should not be needed since the sensors should be calibrated.
Gyro Movement ESP32 ESP8266
The software will detect if the gyro is moving and if this is the case it will go back to sleep for 60 seconds. This way we should avoid faulty measurements and peaks in the graphs.
WIFI connection issues ESP32 ESP8266
The software will not wait indefinitely for a wifi connection. If it takes longer than 20 seconds to connect then the device will try the secondary wifi configuration, and that also fails it will go into deep sleep for 60 seconds and then retry later. This to conserve batter as much as possible.
Use gyro temperature sensor ESP32 ESP8266
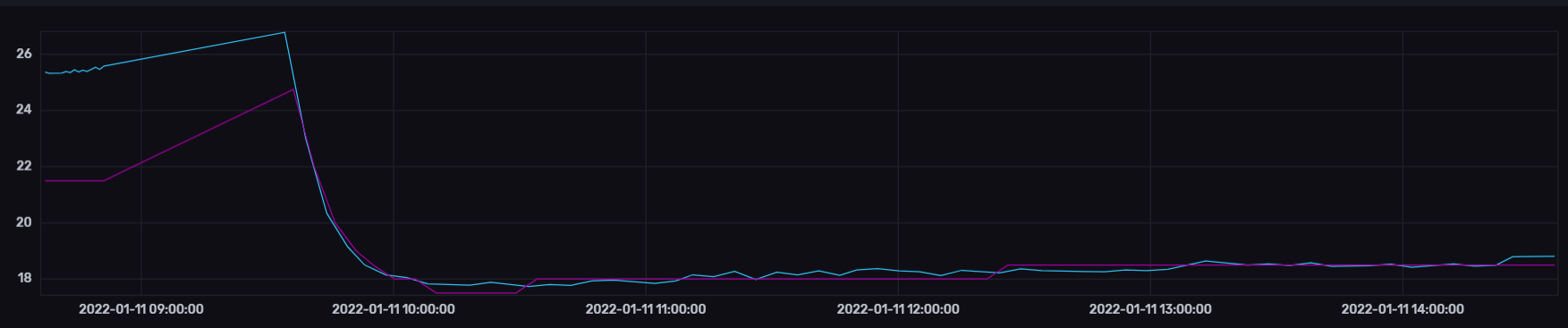
This works fine when the device has time to cool down between measurements and it saves up to 400 ms. My testing shows that this is quite accurate with a deviation of less than 0.3C. This reduces the run time by 20% (with optimal wifi connection).
The graph below compares from the temp from two different devices in the same bucket of water. One with gyro temp enabled and one with the DS18B20 sensor. The blue line is the gyro temperature and this clear that the temperature will be higher after it has been running but cools down when in sleep mode. The interval has been set to 300s. A low delay of 30s will not allow the gyro to cool down and the temperature will be 0.5-1.0C higher.
Celsius or Fahrenheit ESP32 ESP8266
You can switch between different temperature formats. GravityMon will always use C for it’s internal calculations and convert to F when displayed.
SG or Plato ESP32 ESP8266
You can switch between different gravity formats. GravityMon will always use SG for it’s internal calculations and convert to Plato when displayed.
Stable gyro data ESP32 ESP8266
The device will read the gyro 50 times to get an accurate reading. If the standard deviation is to high it will not use the data since this is inaccurate and the device is probably moving, probably do to active fermentation or movement of fermentation vessel. This sequence takes 900 ms seconds to execute and besides wifi connection this is what consumes the most battery. With more testing this might be changes to either speed up or provide more stable readings.
Crash detection and Error Logging ESP32 ESP8266
There is a build in logging function so that errors that occurs can be detected and logged to a file. On the ESP8266 crashes will also be logged so that these problems can be detected and fixed. Crash logging is not available on the ESP32 variants.
Performance measurements ESP32 ESP8266
I’ve also create a small library to measure execution code in some areas of the code that i know is time consuming. This way I can find a good balance between performance and quality. This is a lot of help trying to figure out where bottlenecks are in the code and where to put optimization efforts. Examples of real measurements:
Reading the gyro: 885 ms
Reading DS18B20 temperature sensor: 546 ms
Connect to WIFI: 408 ms
Send data to local influxdb v2: 25 ms
Send data to local mqtt server: 35 ms
Send data to local http server: 40 ms
Send data to http server on internet: 0.2 - 5 seconds
See the Compiling the software for more information.
Battery saving ESP32 ESP8266
If the battery voltage drops below 20%, then the device will enter battery savings mode and change the sleep interval to 1 hour.
Custom board support ESP32 ESP8266
There are lots of boards out there that can support a gravitymonitor and now there is a possibility to add custom builds for boards that I dont have access to, in sense a community approach where everyone can add new boards that can be supported. See: Custom boards
Hardware testing ESP32 ESP8266
There is a built in hardware testing function that can be used to test the different components of the device. This is useful for troubleshooting and to make sure that the device is working as it should. The tests include:
Chip information (family, cores, revision, features)
I2C bus scan (detected device addresses)
Gyro test (MPU6050 self-test for accelerometer and gyroscope axes)
Temperature sensor test (DS18B20 detection, address, resolution)
DS18B20 counterfeit check (deviation count and sensor family classification)
Battery life¶
For the 1.2 version I have been running some long term battery tests on a few of the boards and also comparing wifi vs Bluetooth. I was using a standard 2200 mA battery that was fully charged at the start of the tests. All devices started with factory settings with only a change in push destination and sleep interval.
For the wifi tests, I was pushing data every 30 seconds to a local influxdb2 server to reduce errors connected to slow response on the server side. The devices was placed 2 meters from the wifi AP to ensure a good and stable wifi connection (so ideal conditions).
For the Bluetooth tests I was pusing data every 10 seconds to a linux server.
To make this comparable I measured how many times the device was able to wake up and push data before the battery was dead. I theory the power consumption when in deep sleep is to low it can almost be ignored for the calculations. So the impact on battery is mainly caused by how long the device is awake. In the most optimal case this can be as low as 1.5-2.0 seconds but in reality its probably around 3-4 seconds. Wifi consumes a lot of power so Bluetooth is a better option for long battery life.
Device |
Transmissions |
30s |
300s / 15min |
|---|---|---|---|
ESP 8266 (wifi) |
26,000 |
9 days |
90 days |
ESP32 c3 (wifi) |
12,000 |
4 days |
43 days |
As you can see from the table above there is quite some differences between the boards and connection methods.
Performance¶
Since I have the possibility to measure the performance of different function in the code this is what I have been able to gather.
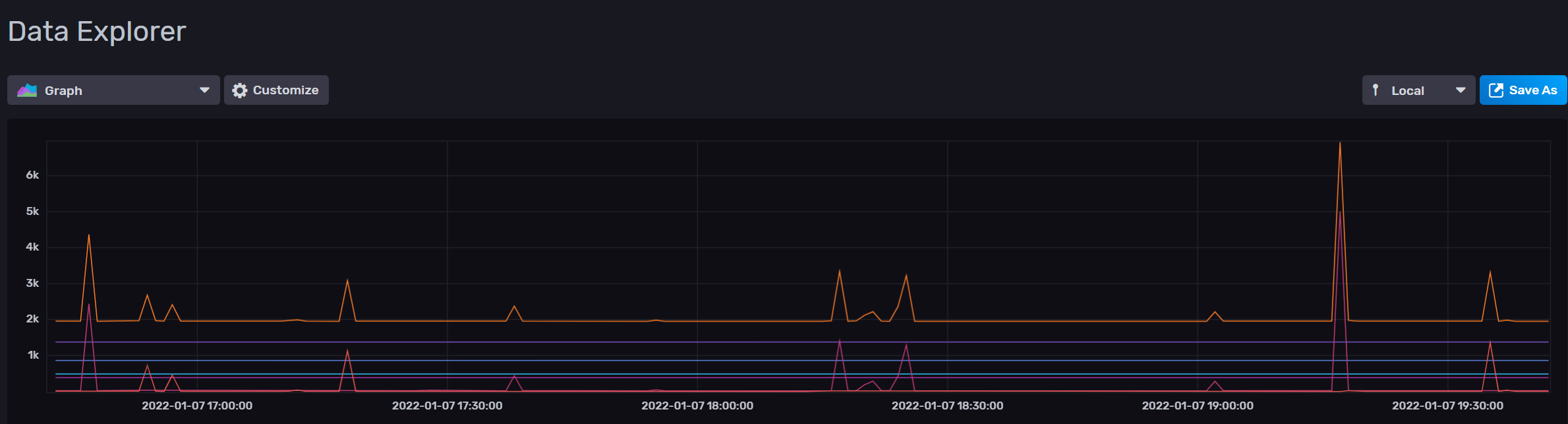
The typical runtime in a measurement cycle is approx 2 seconds and in some cases it can take up to 6-8 seconds but this is mainly related to establishing the WIFI connection. So stable wifi is essential for long battery life. Out of the 2 seconds of run-time the major time is spent on gyro readings (1.3s) and temperature measurements of (0.6s) so using the gyro sensor for measuring temperature would reduce the total runtime with 25%. Sending data over http takes less than 100ms (on my local network) so this is not drawing much power.
The image below shows how the run-time varies over time. The pink line is the wifi connection time and this is why the time varies. The orange is the total runtime for the awake period.